رسد لاءِ Telescopic Belt Conveyor
وضاحتون/پيراميٽر
Telescopic بيلٽ conveyor بنيادي طور تي ٺهيل سيڪشن، telescopic سيڪشن، telescopic ڊرائيونگ ميڪانيزم، بيلٽ پهچائڻ واري ميڪانيزم، مخالف ٽڪري ميڪانيزم ۽ ڪنٽرول سسٽم تي مشتمل آهي.
۽ پڻ شامل آهي ڪجهه معاون ميڪانيزم جي بنياد تي گراهڪ جي گهرجن جي بنياد تي جيئن ته هوپ جي جوڙجڪ، کڻڻ وارو نظام، چڙهڻ واري ميڪانيزم وغيره.
دوربين جي قسم جون مشينون روايتي يا همپڊ تعمير جون ٿي سگهن ٿيون (همپڊ دوربيني مشينون خاص طور تي سخت حالتن سان سائيٽن ۾ استعمال ٿينديون آهن، جتي گاڏين کي لوڊ ڪرڻ وقت دوربيني مشين جي وڌيڪ سامهون واري آخر ۾ انٽرفيس کي ترتيب ڏيڻ آسان آهي).
Telescopic conveyor جي مختلف ساخت:
مقرر Telescopic conveyor،
مائل Telescopic Conveyor/Climbing Telescopic Conveyor کڻڻ وارو Telescopic Conveyor
متحرڪ / موبائل Telescopic conveyor قسم، gooseneck قسم
پيرا ميٽرز
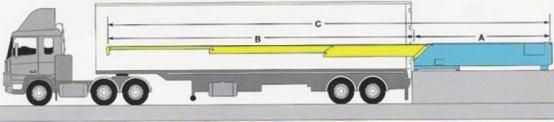
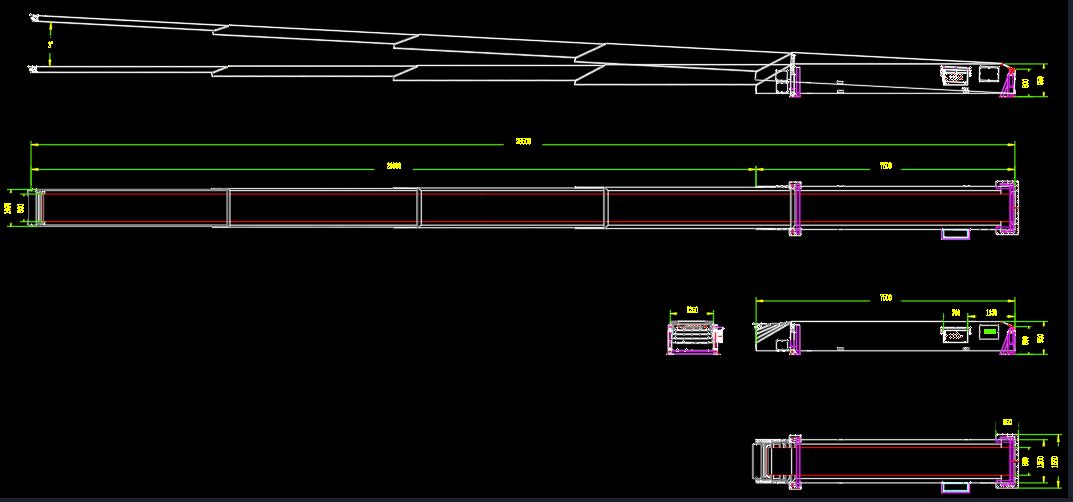
| نه. | اسپيڪ | الف (ايم ايم) | ب (ملي) | سي (ايم ايم) | E (mm) | هڏي جي جوڙجڪ | بيلٽ جي ويڪر (ايم ايم) |
| مقرر پڄاڻي | دوربين جي پڇاڙي | ڪل ڊگھائي | مقرر اونچائي | ||||
| 1 | 3 | 5000 | 7000 | 12000 | 800 | —— | 800 |
| 2 | 6000 | 8400 | 14400 | 800 | اختياري | ||
| 3 | 4 | 6000 | 12600 | 18600 | 900 | اختياري | |
| 4 | 8000 | 17000 | 25000 | 900 | اختياري | ||
| 5 | 5 | 6000 | 16000 | 22000 | 900 | اختياري | |
| 6 | 7500 | 21000 | 28500 | 900 | اختياري |
مکيه ٽيڪنيڪل معيار


1. ڪنويئر بيلٽ لوڊ کڻڻ جي صلاحيت 60kg/㎡ کان گهٽ ناهي، مثبت ۽ منفي پهچائڻ واري ڪم سان.
2. جڏهن بيلٽ ڪم ڪري رهيو آهي، بيلٽ کاٻي ۽ ساڄي جھولي جو فاصلو 20mm کان گهٽ آهي.
3. پهچائڻ جي رفتار: 20-45m / منٽ (تعداد ڪنٽرول، شروعاتي رفتار 30 م / منٽ آهي)؛
تيز رفتار telescopic conveyor رفتار:: 40-70m / منٽ (تعدد ڪنٽرول، ابتدائي رفتار 55 م / منٽ آهي).
4. وڌ ۾ وڌ اسپيڊ اسپيڊ 10m/منٽ، فريڪوئنسي ايڊجسٽبل.
5. بيلٽ جي ويڪر 800mm، ٿولهه 3mm؛ PVK / پي وي سي مواد.
6. fuselage ڪافي مضبوط هجڻ گهرجي، مڪمل طور تي وڌايو وڃي آرام سان ۽ مڪمل لوڊ سان، ٽن حصن واري مشين جو ٻوٽو 50mm کان گهٽ هجڻ گهرجي، چار-سيڪشن جو قطرو 120mm کان گهٽ هجڻ گهرجي، ۽ ٻوٽو پنج-سيڪشن 150mm کان گهٽ هجڻ گهرجي.
7. موٽر برانڊ: SEW يا Nord.
9. توسيع زنجير سپروڪٽ دانت جي مٿاڇري سان اعلي معيار جي برانڊ کي اختيار ڪري ٿو.
ڪنفيگريشن جون خاصيتون
1. دوربيني موٽر، ڊرائيو موٽر ۽ هائيڊولڪ اسٽيشنون ملڪ ۽ ٻاهرين ملڪن ۾ مشهور برانڊز مان آهن.
2. دوربيني مشين جي لفٽنگ ۽ لوئرنگ زاويه عام طور تي -1 ° ۽ 3 ° جي وچ ۾ آهي، جيڪا پروجيڪٽ جي صورتحال مطابق ترتيب ڏني وئي آهي.
3. جڏهن دوربيني ۽ پهچائڻ واري موٽر شروع ٿئي ٿي، ان کي سست شروع ڪرڻ ۽ اشارو ڪرڻ واري عمل جو ڪم آهي؛اهو telescoping دوران ميل پهچائڻ جي فنڪشن کي محسوس ڪري سگهي ٿو، اهو اڳتي وڌڻ ۽ ريورس پهچائڻ جي ڪم کي محسوس ڪري سگهي ٿو، اڳتي وڌڻ ۽ ريورس سوئچنگ کي الڳ الڳ ۽ آسان منتقلي کي ڪنٽرول ڪرڻ گهرجي.